Pix4DMapper
There is no difference when processing this data in Pix4DMapper, so please follow our regular guide here: How to Process MicaSense Sensor Data in Pix4D.
Agisoft
You should mostly follow the Agisoft guide for your specific camera (RedEdge-MX or Altum), but first make the following changes to your environment:
Import your images:
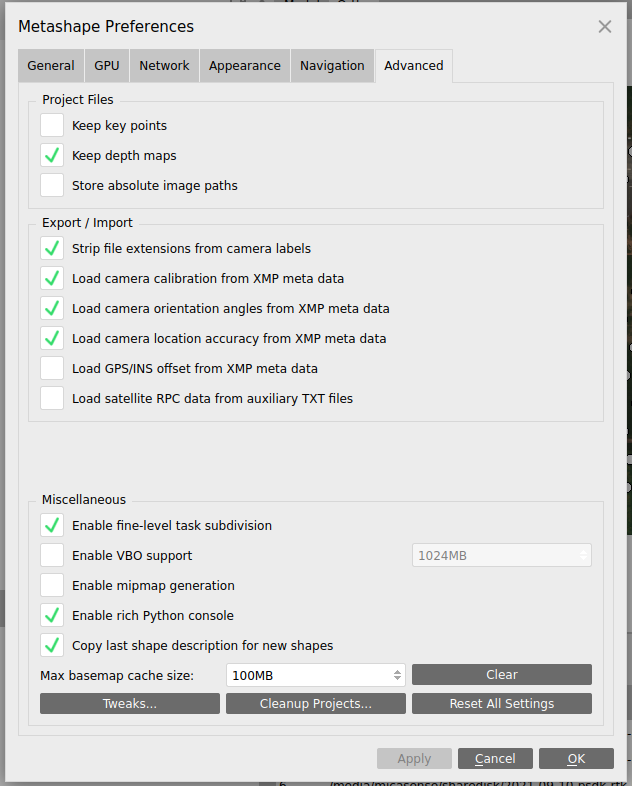
In the Tools>Preferences menu, go to Advanced and check “Load camera orientation angles from XMP meta data” and “Load camera location accuracy from XMP meta data”.
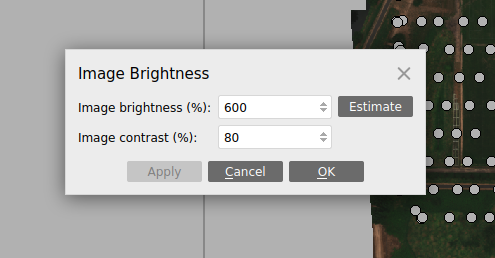
Another useful tip is to change the image brightness. You can do this in the Tools > Set Brightness menu. 600% brightness and 80% contrast are a good place to start, but you may need to adjust them depending on your data.
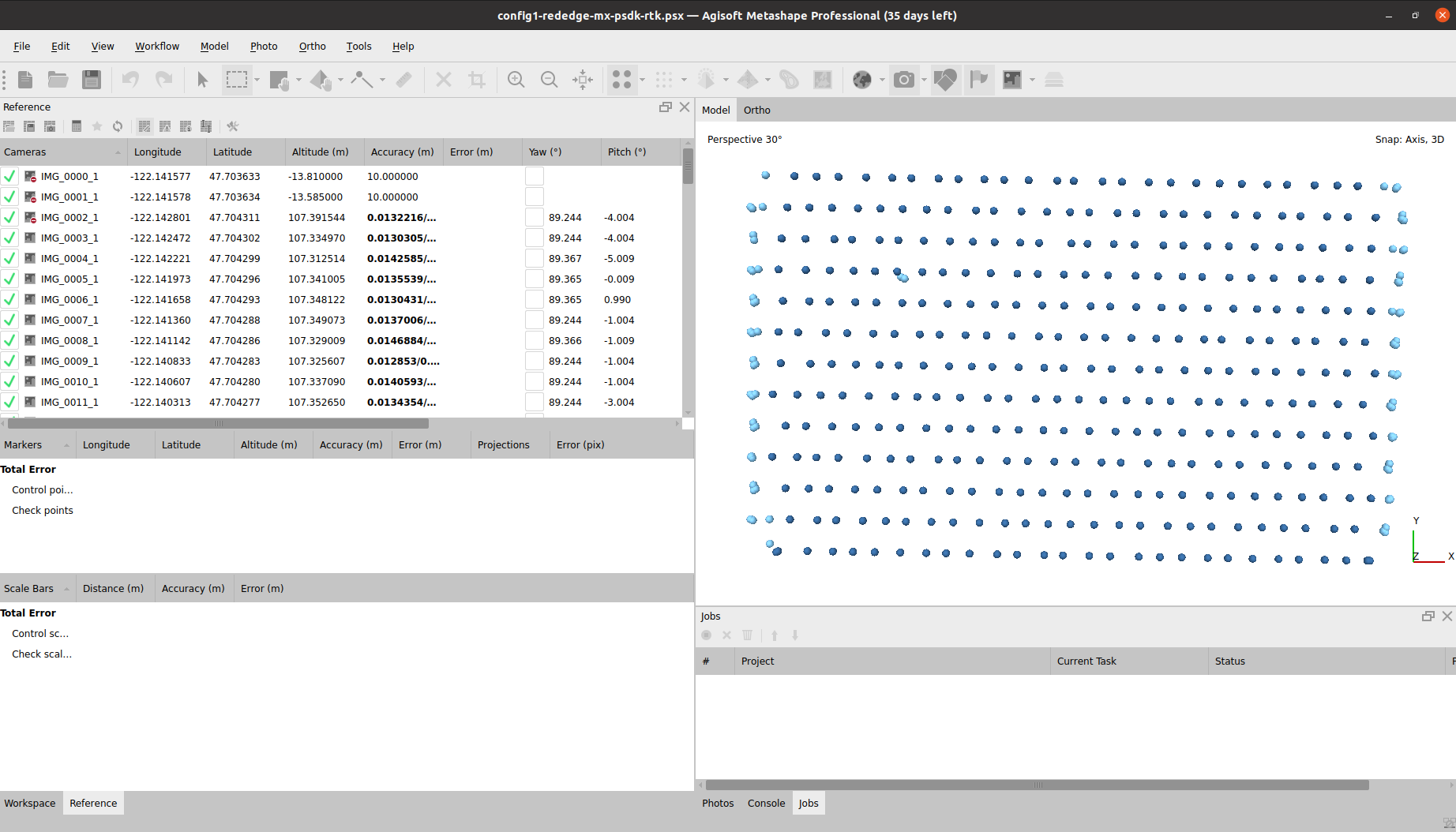
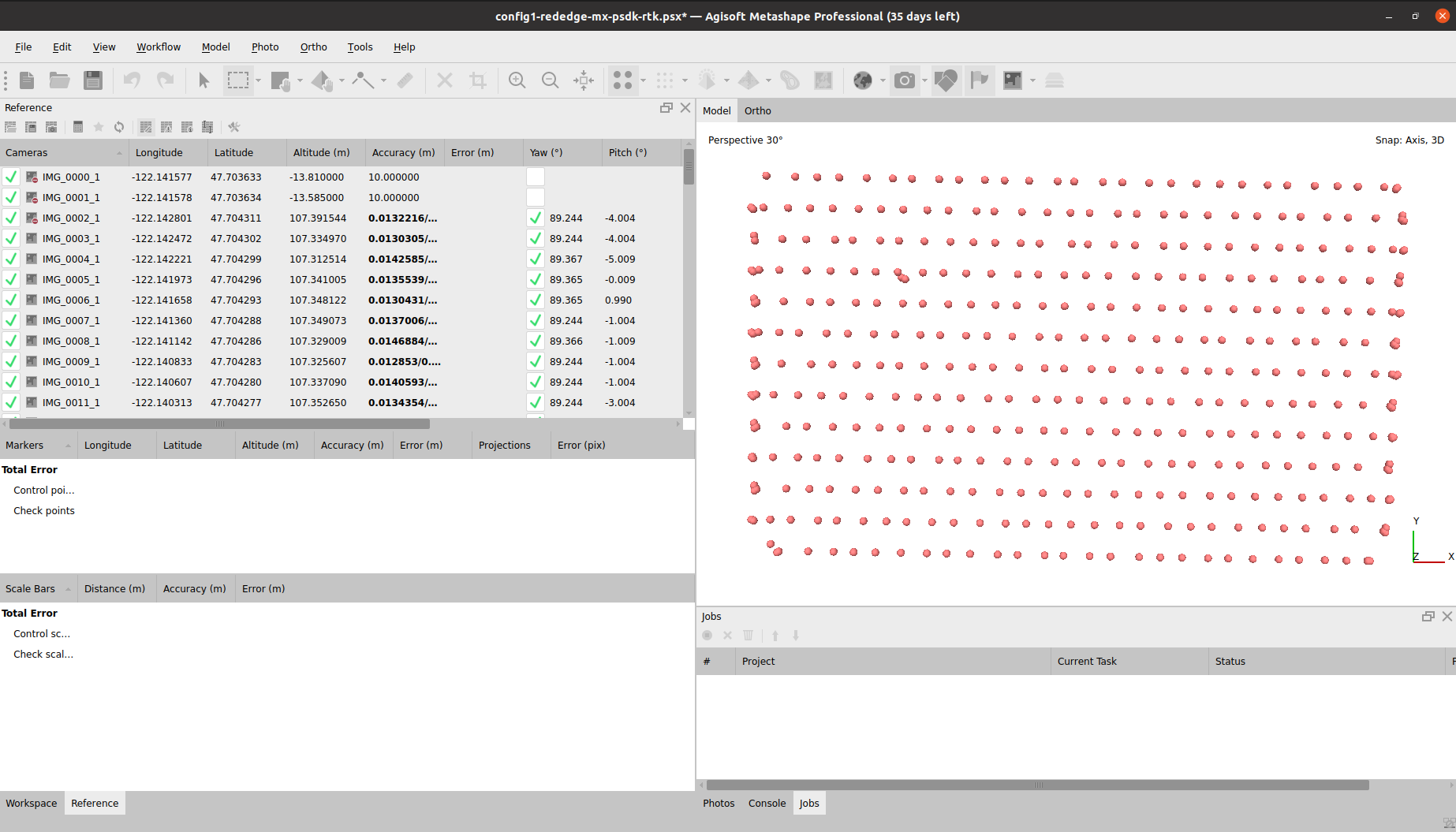
Go to the Reference tab. Select all images, then click one of the Yaw checkboxes. This should automatically check all of the images with Yaw metadata.
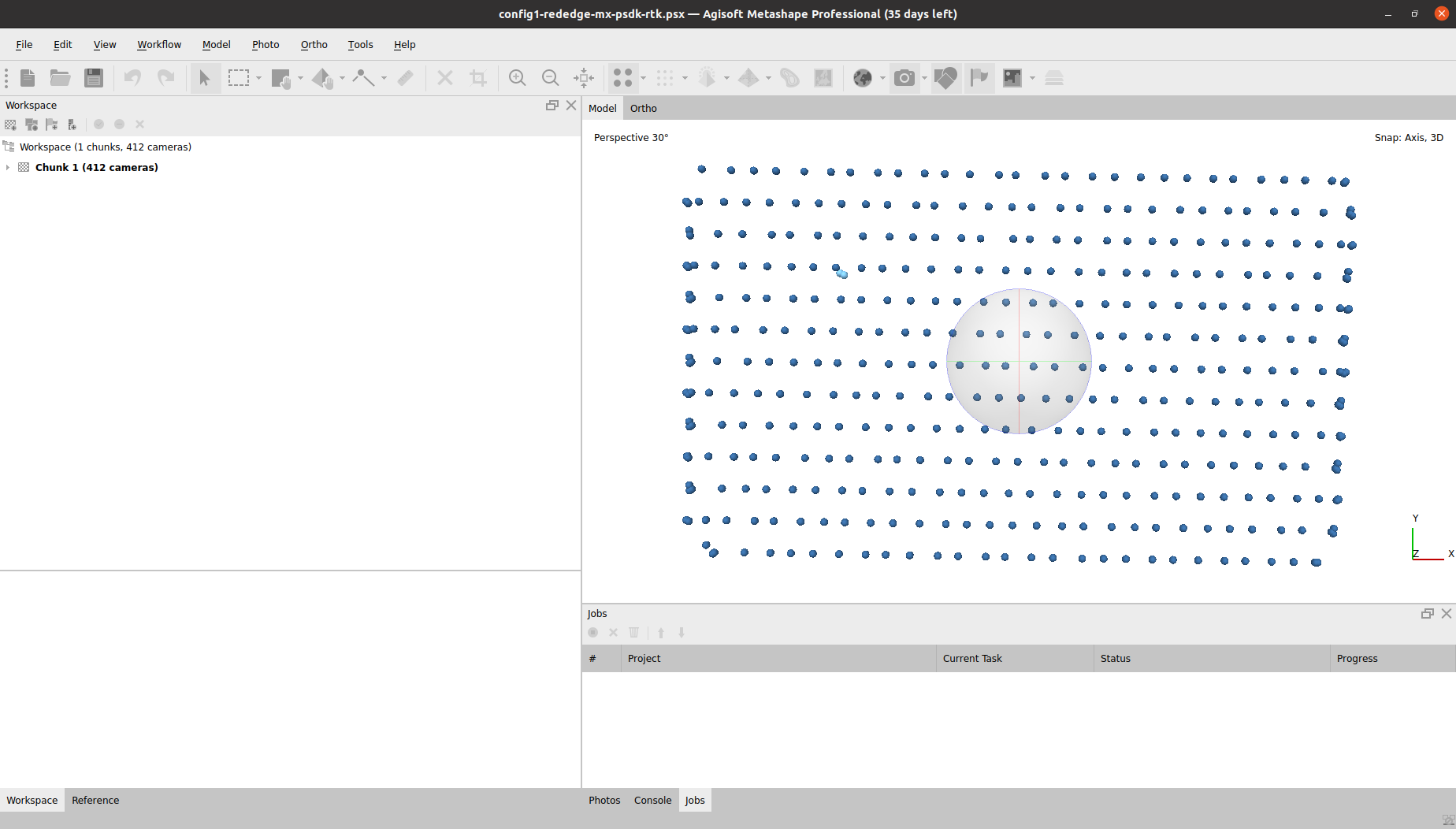
Use the selection tool the select and disable the cameras when the drone is turning around. These images are typically non-nadir and including them will negatively impact your mosaic.