
On the RedEdge-3, the GPS connector's Pin 4 is a general purpose input pin. For advanced integrations, this pin can be changed from a digital input to a digital output in the Advanced Configuration page.
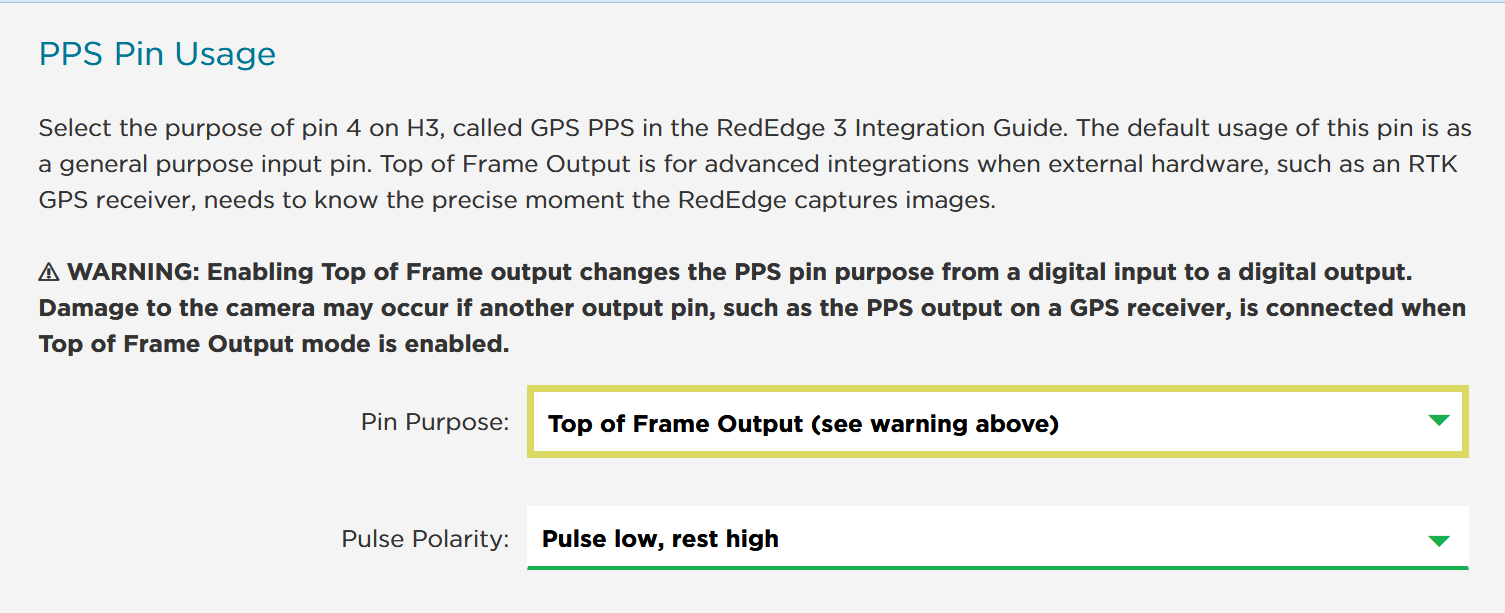
The setting is called Top of Frame Output and is for advanced integrations only, when external hardware, such as an RTK GPS receiver, needs to know the precise moment the RedEdge captures images. It is available in firmware version 1.5.28 and higher.
Technical Details
The Top of Frame output is a 3.0V, 100ms pulse, with the leading edge indicating the beginning of the exposures. The output should be considered an open-drain output (though it has an edge-accelerator in both directions). Large capacitive loads can cause the edge-accelerator to be triggered multiple times as the signal rises and falls which may can cause double triggering. The output is coupled to the connector pin through a 100ohm resistor and has around 25pF of capacitance to the pin.
⚠ WARNING: Enabling Top of Frame output changes the PPS pin purpose from a digital input to a digital output. Damage to the camera may occur if another output pin, such as the PPS output on a GPS receiver, is connected when Top of Frame Output mode is enabled. Also, the top of frame signal should not go through the DLS.
Post Processing Required
If you use this method, you will have to update the metadata of the images with the RTK GPS information in post processing. As a backup, it is a good idea to send constant GPS information to the camera during flight using the Serial or HTTP APIs, which the camera will write into the image metadata.
The basic workflow is as follows:
- During flight, log the top-of-frame output from the PPS pin.
- After the flight, use your log to match RTK GPS information with each image.
- Write the GPS information into the metadata of each image.