INTRODUCTION AND SCOPE
This document provides the information required for mechanical and electrical integration of a MicaSense RedEdge 3 multispectral camera onto a host aircraft.
CAMERA DIMENSIONS AND MASS
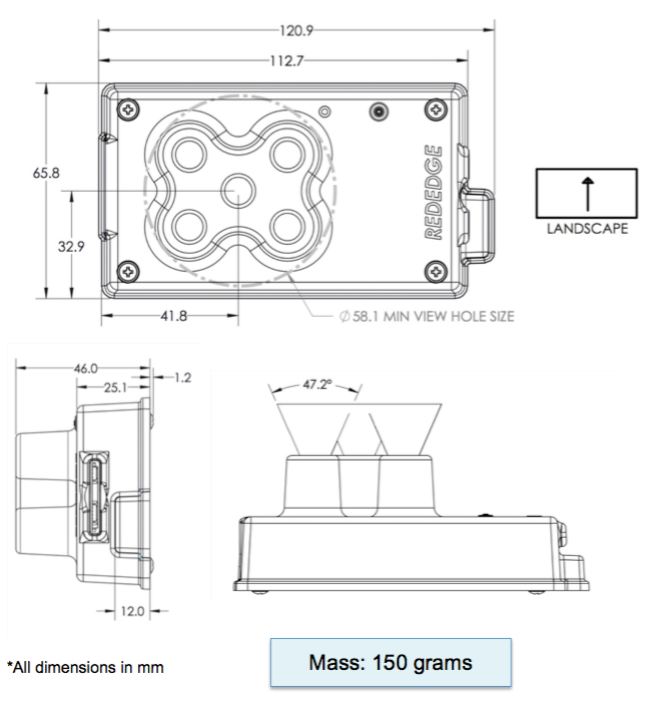
Mass: 150 grams
LENS AND IMAGER INFORMATION
|
HFOV |
47.2 deg (5.4 mm Focal Length) |
|
Aspect Ratio |
4:3 |
|
Sensor size |
4.8 mm x 3.6 mm , 1280 x 960 Global Shutter |
ATTACHMENT POINTS
The RedEdge 3 camera can be attached to the host aircraft using at least 2 of the 4 provided threaded mounting points. 4-40 screws are used for this purpose.
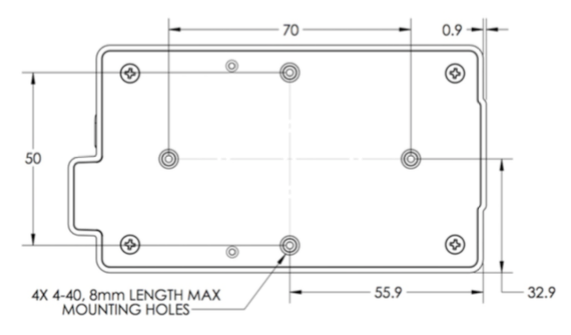
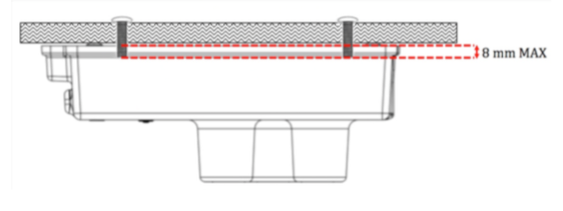
CAUTION Do not use a screw that will extend into the threaded holes by more than 8 mm (0.3”). Use a washer or other spacer to ensure that the screws do not go into the camera too far.
NOTE: A very light coating of non-permanent thread locker can be used to prevent the screws from coming loose due to vibration. Wipe off excess thread locker from screw prior to insertion.
RECOMMENDATIONS FOR INSTALLATION
- The camera should be installed such that it has a clear view of the area directly below the aircraft. The “cone” of the lenses (47.2 degrees total Horizontal Field of View) should be considered in the process of deciding where to mount the camera on the aircraft or payload bay.
- Thanks to global shutter imager technology, the camera is able to withstand some vibration without degrading image quality; nevertheless, vibration isolation between the camera mounting platform and the aircraft is recommended.
- Use of a gimbal is highly recommended to ensure that the camera is pointing straight down (with respect to the earth) at all times during flight. This is especially important for multi-rotor aircraft installations. This gimbal system need only be a “servo-driven” gimbal (for pointing as opposed to high-frequency stabilization).A brushless motor type gimbal (mass-balanced, free-floating) can also be used, but it is not required.
- If the camera’s GPS module is used for providing GPS information to the camera, it should be installed in a location of the aircraft where it will have a clear view of the sky. Install the module far away from any devices that could interfere with it (datalink or video transmitters for instance).
INPUTS AND OUTPUTS
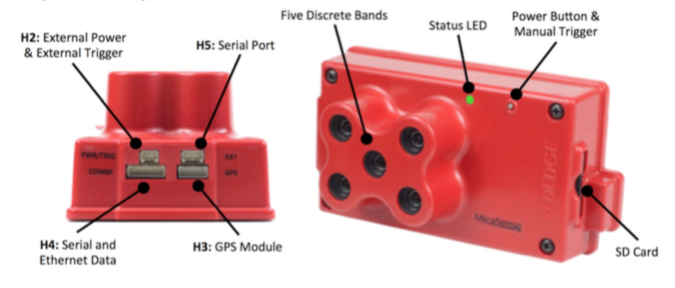
H2: External Power and External Trigger
Signal definitions and connector
|
Pin # |
Signal |
|
1 |
Trigger |
|
2 |
Ground |
|
3 |
Power |
|
Connector on Camera |
Hirose DF13A-3P-1.25H(21) |
|
Mating Connector |
Hirose DF13-3S-1.25C 28AWG wire recommended |
Pin 1 indicator on DF13 family of connectors (DF13-3S-1.25C shown)

Power Input
|
Item |
Value |
|
Nominal Voltage |
5.0 V DC |
|
Voltage Range |
4.5 V to 5.5 V DC |
|
Absolute Maximum Voltage |
5.5 V DC |
|
Average Power |
3.5 Watts average, 4.5 W peak (Camera Not Providing Power to External GPS Module) |
|
4.0 Watts average, 5.0 W peak (Camera Providing Power to External GPS Module) |
Trigger: The camera can be triggered either with a rising-edge/falling edge pulse or a PWM signal (such as is typically used with standard servos). When using a PWM signal as the trigger, the camera detects a transition from a “long” PWM to a “short” PWM (or vice-versa depending on the configuration setup of the camera)
|
Item |
Value |
|
Nominal Voltage |
3.0 V DC |
|
Voltage Range |
0.0 V DC to 5.0 V DC |
|
Absolute Maximum Voltage |
5.0 V DC |
|
PWM Trigger Expected Range |
1.0 ms to 2.0 ms |
CAUTION Care should be taken when multiple “grounds” are used for power and trigger of the camera. Only one ground should be connected to the camera – typically this is the ground that corresponds to the source of the power. If the ground of the trigger signal and the ground of the power source are different, they should not be joined together electrically at the camera. Contact support if further information is needed.
H3: GPS Module
A GPS module is connected to this connector, similar to 3DR’s GPS module.
Signal definitions and connector
|
Pin # |
Signal |
Direction |
|
1 |
5.0 V DC Output |
Output From Camera |
|
2 |
GPS RX |
Output From Camera |
|
3 |
GPS TX |
Input To Camera |
|
4 |
GPS PPS |
Input To Camera |
|
5 |
Not Connected |
N/A |
|
6 |
Ground |
Ground |
|
Connector on Camera |
Hirose DF13A-6P-1.25H(21) |
|
|
Mating Connector |
Hirose DF13-6S-1.25C 28AWG wire recommended |
|
The camera uses the ublox UBX binary protocol for communication back and forth to the GPS using the NAV and RXM data classes.
H4: Serial and Ethernet Data
Connector H4 is available for tighter integration with host aircraft. It includes a standard TTL-level serial port as well as an Ethernet port. Documentation for the communications protocol is available by contacting MicaSense.
|
Pin # |
Signal |
Direction |
|
1 |
Serial RX (3.3 V) |
Output From Camera |
|
2 |
Serial TX (3.3 V) |
Input To Camera |
|
3 |
Serial Ground |
Ground |
|
4 |
Ethernet TX P |
Input To Camera |
|
5 |
Ethernet TX N |
Input To Camera |
|
6 |
Ethernet Line Ground |
Ground |
|
7 |
Ethernet RX P |
Output From Camera |
|
8 |
Ethernet RX N |
Output From Camera |
|
Connector on Camera |
Hirose DF13A-8P-1.25H(21) |
|
|
Mating Connector |
Hirose DF13-8S-1.25C 28AWG wire recommended |
|
H5: Serial Port
Reserved.