Table of Contents
- Quick Start
- Connections
- Mounting Considerations
- Power On and Configuration
- Magnetometer Calibration
- Operation
- Specifications
The Downwelling Light Sensor (DLS) is a 5-band light sensor that connects directly to a MicaSense RedEdge camera. The DLS measures the ambient light during a flight for each of the five bands of the camera and records this information in the metadata of the images captured by the camera. When properly installed and calibrated, the information sensed by the DLS can be used to correct for lighting changes in the middle of a flight, such as those that can happen due to clouds that cover the sun during a flight.
This guide provides instructions for installation and calibration of the DLS to enable gathering of good data. You should note that there are two primary configurations for the RedEdge camera with DLS:
RedEdge Camera + DLS + 3DR GPS Module
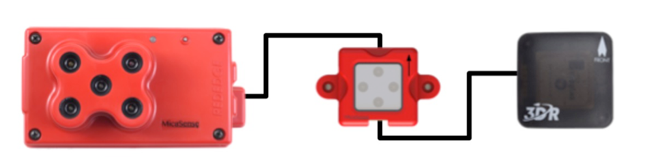
- In this configuration, the 3DR GPS module provides GPS data (lat/lon/alt) to the camera via the DLS.
- The 3DR GPS module also has a 3-axis magnetometer inside it to measure magnetic heading and it provides magnetic field information to the camera.
- This magnetometer must be properly calibrated as shown in Section 3 in order for data from the DLS to be useful.
RedEdge Camera + DLS + Autopilot Data (Serial / Ethernet Connection)

- In this configuration, a device such as a Pixhawk autopilot or similar autopilot or payload computer provides attitude data to the camera. The following messages must be sent to the camera via serial or Ethernet connection (MAVlink or HTTP API) in order to achieve good irradiance data results:
- Pitch Angle, Roll Angle, and Yaw Angle (Heading) (attitude)
- Latitude, Longitude, and Altitude
- UTC Timestamp and Date
- In this configuration, ensure that the magnetometer in your system is well calibrated and provides accurate heading data that is not affected by electromagnetic fields in the aircraft.