MicaSense Sensors enable you to capture great data. This article offers some basic guidelines to provide the best results. It covers the following topics:
- Mission planning, to ensure proper overlap
- When to best capture data to minimize shadows
- How to properly use a calibrated reflectance panel; and
- The effects of ambient light conditions on your data
Mission Planning
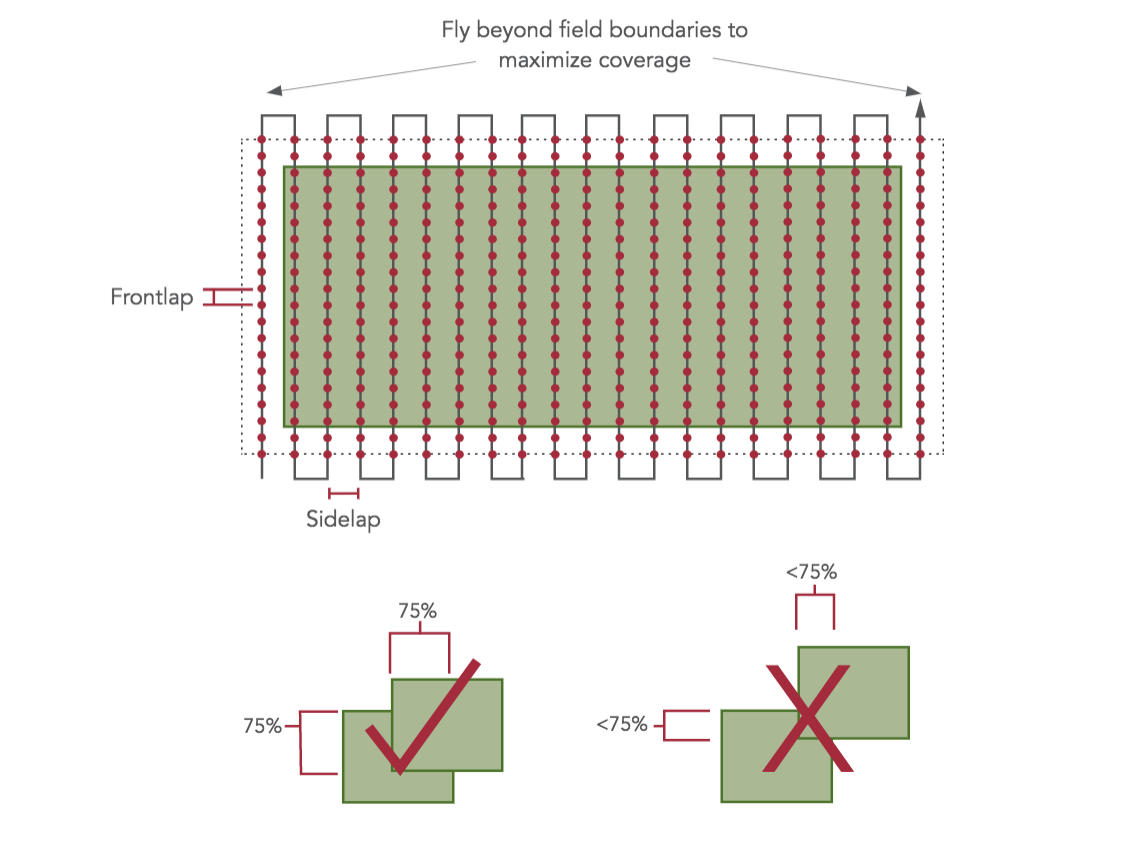
Good data starts with good mission planning. The area to be captured should be larger than the actual field of interest so that there is sufficient data all the way to the edges of the field. Set up a grid survey using your system’s mission planning utility. One additional flight track should be configured on either side of the field. Also be sure there is sufficient space at the end of each flight track for the aircraft to re-align for the next pass. This is particularly important for fixed-wing aircraft platforms.
Overlap
When setting up the mission, pay careful attention to the distance between tracks, the sidelap, and the distance between successive captures, the frontlap. Both of these should be configured to yield a 75% overlap.
By 75% overlap, we mean that as the aircraft travels along a flight track, each following image overlaps the previous by 75%, both in the forward direction as well as the side direction on the parallel track.
Flight Planners and Camera Parameters
Use your system’s mission planning utility to set up the flight plan at 75% overlap. It is essential that the mission planner you use supports your camera's specific parameters. If there is not a pre-set option for MicaSense cameras (such as RedEdge-MX, RedEdge-P, Altum, etc.) then you may need to enter a "custom camera" and enter the parameters of your particular camera model (which can be found in the integration guide for your camera).
If you have any doubts about setting up your mission, please refer to the MicaSense Knowledge Base or contact us.
Speed and Altitude
Keep in mind that the frontlap along the flight direction also depends on the flight speed and altitude above the ground. MicaSense Sensors can capture images quickly, as fast as once a second. However, there are combinations of flight altitude and flight speed that will not yield proper frontlap. As this graph shows, slower speeds should be used at lower flight altitudes.
Sample overlap chart for MicaSense Sensors

Proper overlap is extremely important for good quality data. If the overlap is insufficient, the outputs are likely to have defects such as blotchy artifacts or errors in the image alignment.
As you create a flight mission, if the field to be mapped requires more than one flight to fully cover, the flights should overlap by at least one pass.
When setting up a flight mission over fields that have rows planted in a specific direction, the flight tracks should be oriented such that they are perpendicular to the rows if possible. This will provide the most consistent data output for this type of field.
When imaging tall trees or crops, the height of the tallest objects should be used for flight planning. it's important to consider the altitude of the forest canopy when calculating overlap.
Results of poor overlap

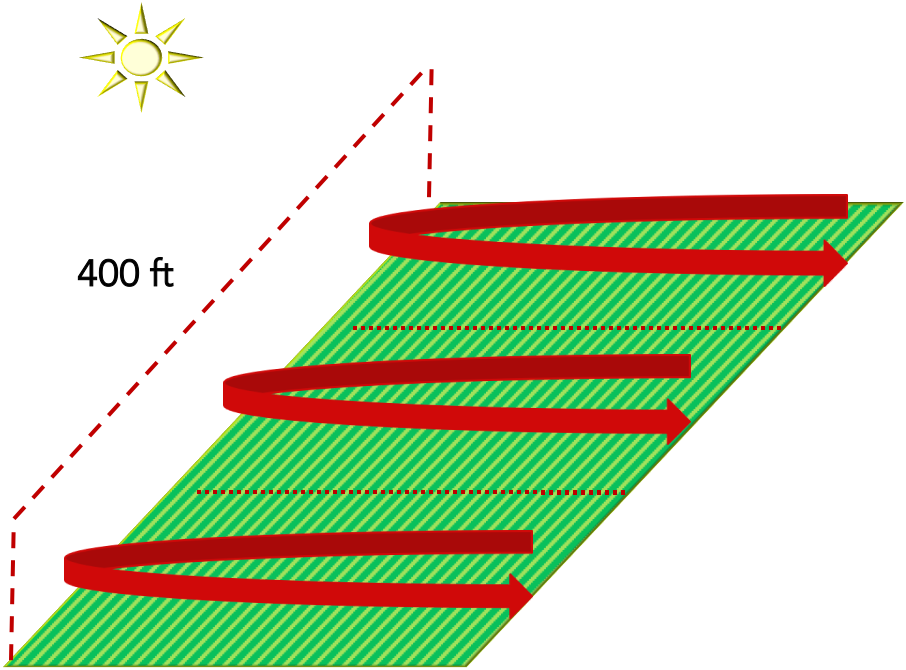
Best Time for Capture
The time of day for capturing data is also important. Flights should be performed within two and a half hours of local solar noon.

By doing this, the output does not suffer from deep shadows, which can significantly affect the multispectral results. Shadows not only obscure some vegetation but can also affect values of vegetation indices over areas that are fully or even partly shaded.
Avoid sunspots
The only exception to flying at solar noon would be if you were to fly in very sunny conditions where, if the sun were directly overhead, it would produce bright sunspots in the data you capture. In cases like this, we recommend flying while the sun is at a lower angle.
Calibrated Reflectance Panels
To create reflectance-compensated outputs, an image of a calibrated reflectance panel should be captured immediately before and immediately after each and every flight. This applies even if a single field is covered in multiple flights – that is, always capture a panel image before and after each flight for that field.
Before capturing the panel, ensure that the camera has a good GPS fix so that the panel images will contain appropriate location and time information. This is important for post processing.
The panel should be placed flat on the ground, far away from any objects that could affect the light that illuminates it. Stand in front of the panel such that the sun is at your back. Then take a large step to the left or to the right. Hold the aircraft at chest level and point the camera such that the panel is centered in the field of view and such that there are no shadows on the panel. The camera should be directly overhead the panel if possible, or offset slightly to prevent shadows.

Shadows on the panel will invalidate the reflectance compensation readings. Also, if light is reflecting onto another object and then onto the panel, the readings will be inaccurate. In this example, light is reflecting off the clothing of the person holding the aircraft and then onto the panel.
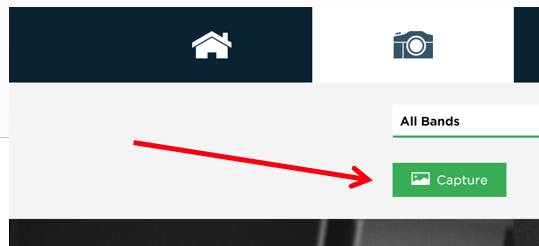
When capturing the panel image using your sensor, use either the Capture button in the camera’s WiFi interface page or push the physical button on the front of the camera. External trigger mode, timer mode, or overlap mode should not be used for panel captures. These modes will cause saturation of the panel images.
Ensure that the light sensor has full view of the sun. Do not cover the light sensor while taking a panel capture. This could cause faulty reflectance calibration in image processing software.
CAPTURE MODE
QR Mode
The best way to capture a reflectance panel is via the Automatic Panel Detection/ QR Mode. For more details on this mode, please see the MicaSense Sensor Guide or this knowledge base article. Alternatively, our sensors have a physical trigger button as well as a capture button in the web configuration page.

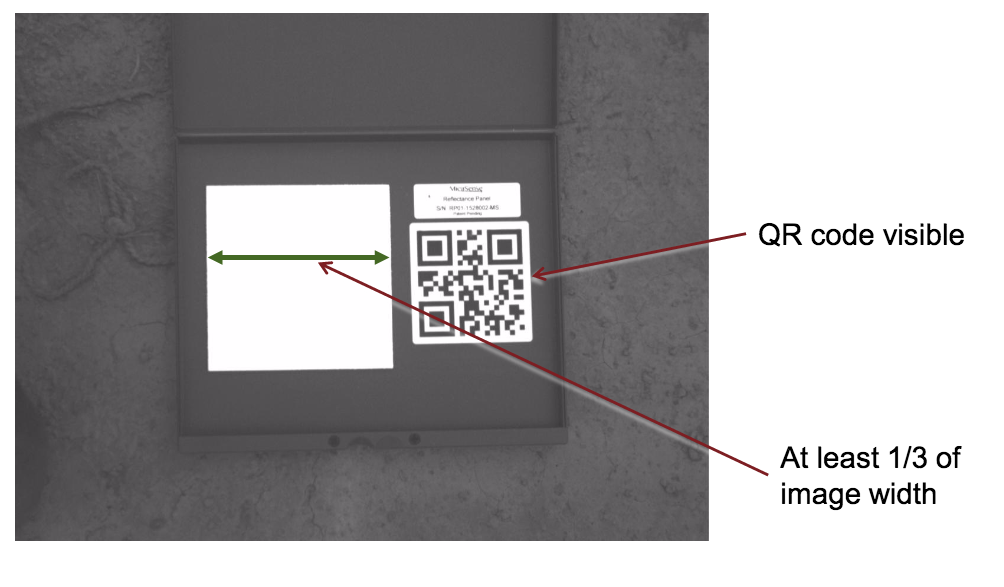
Ensure that the panel takes up at least one third of the image width, and that the QR code and serial number label are visible in the image.
Use a landing pad
Landing pads are remarkably useful for how simple they are. They will prevent any dust, dirt, grass, etc. from blowing around during takeoff and landing, which can sometimes get inside sensitive electrical components. We recommend using a landing pad every time you fly.

Ambient Light Conditions
In order to collect reflectance-compensated results, the light conditions at the time of capture should be consistent throughout any one flight. Clear sunny days as well as light overcast days in which the ambient light is not changing are best. Avoid capturing data in partly cloudy days with rolling clouds.
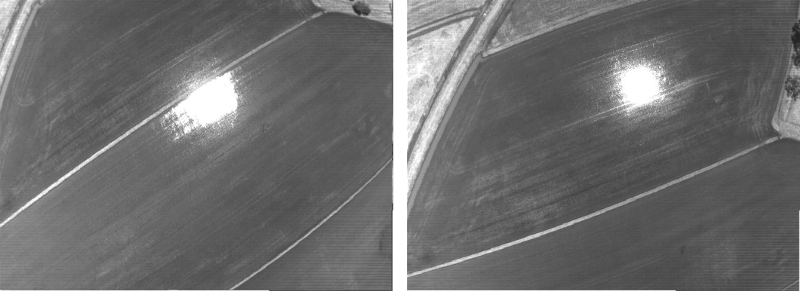
Data captured in cloudy conditions, where the sun is partly or fully obscured for portions of the flight, will suffer from anomalies such as the ones shown in these images.
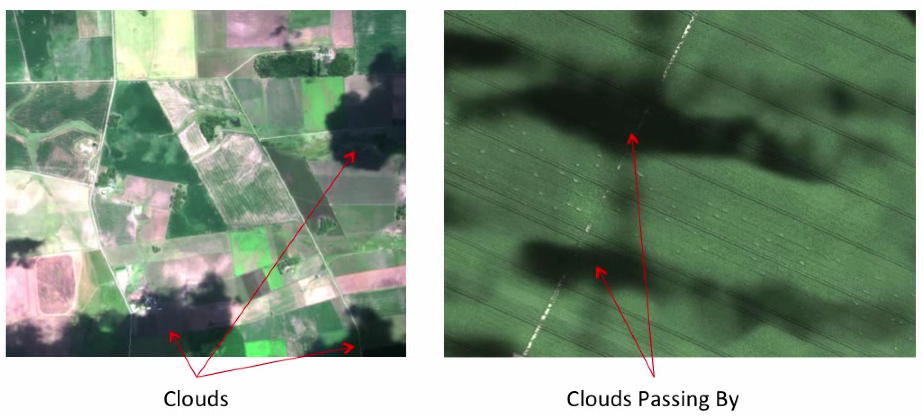
The accuracy of the reflectance values for data captured in these conditions is questionable. Additionally, these defects not only affect the color image but can also affect the vegetation indices.
If capturing data in partly cloudy days is unavoidable, make sure that at least one reflectance panel image is captured in bright conditions.
Feature Variability
Including unique features and variability in your captures helps increase the accuracy of your output mosaic. While it may not be feasible to place unique features everywhere throughout your field, there are other positive actions you can take. One simple way to include variability in your data would be to make extra passes beyond your field, as outlined in the overlap section. The edges of the field are often feature-rich (roads, structures, cars, and others) while the center of a cornfield is quite homogeneous. Including the edges helps to tie it all together.

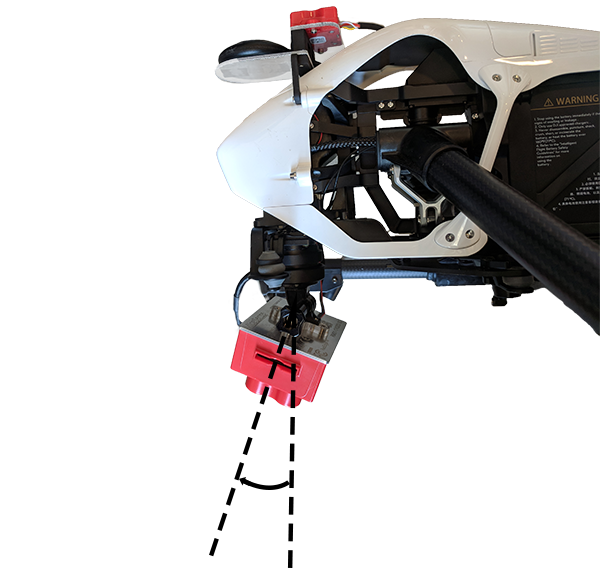
Nadir
It is extremely important to ensure that the camera is pointing at nadir (straight down) or as close to nadir as possible (even if you are flying over sloped terrain). The global shutter of the sensor allows for flight without a gimbal. If you are not using a gimbal, be sure to account for the tilt of the aircraft as it flies forward and adjust the camera's position accordingly. MicaSense customer integration kits are able to account for this tilt.
Sloped Terrain
If you are flying over sloped terrain (such as a vineyard), maintain an altitude which is constant relative to the slope/ground, and fly perpendicular to the field. If "terrain following" is not possible, split the field into multiple flights, choosing an altitude above the highest elevation. Also, choose a time of day to minimize shadows (this may be different than solar noon).
Support
Following these guidelines will help yield the best data output. For further information, access our Knowledge Base, where you can find the latest version of user manuals and other helpful documentation. Or send us an email.