It is possible for RedEdge to be used as a stand-alone system, such that the camera triggers itself in Timer or Overlap mode. However, it is also possible to connect the camera to an autopilot such that the autopilot triggers the camera. This article describes how to accomplish this with a Pixhawk autopilot.
The integration depends on whether the RedEdge camera is powered by a common battery or a separate battery.
a) If RedEdge has its own power source (that is independent from the battery that provides power to the Pixhawk), connect the ground and signal pins of the AUX1 - AUX6 outputs of the Pixhawk to the ground and trigger pins of the RedEdge.
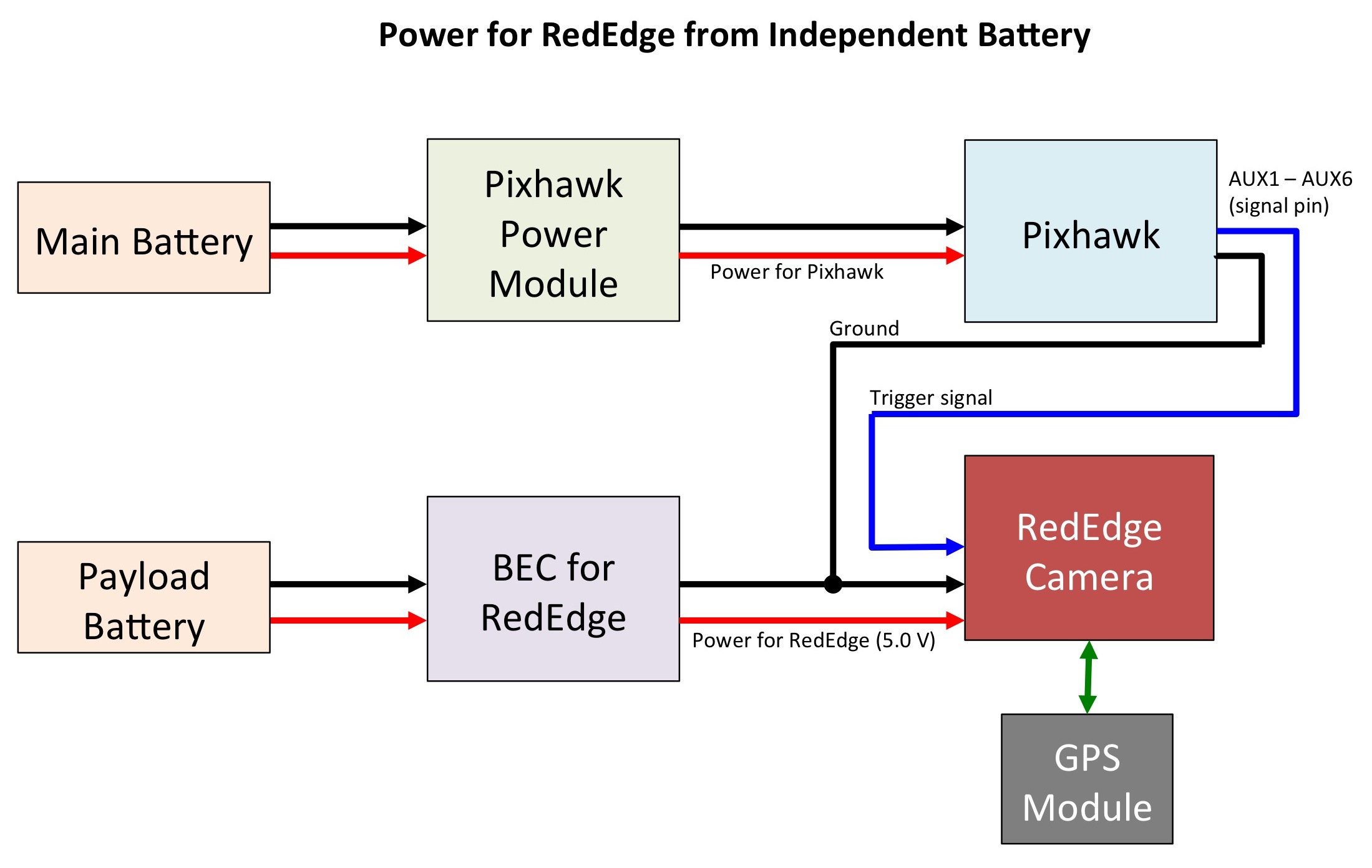
*Note that in the diagram above, a BEC is shown for RedEdge. This BEC is needed to convert a higher voltage battery (2S or 3S) to 5.0 Volts required by RedEdge. If using a 5.0 volt power source, the BEC is not needed.
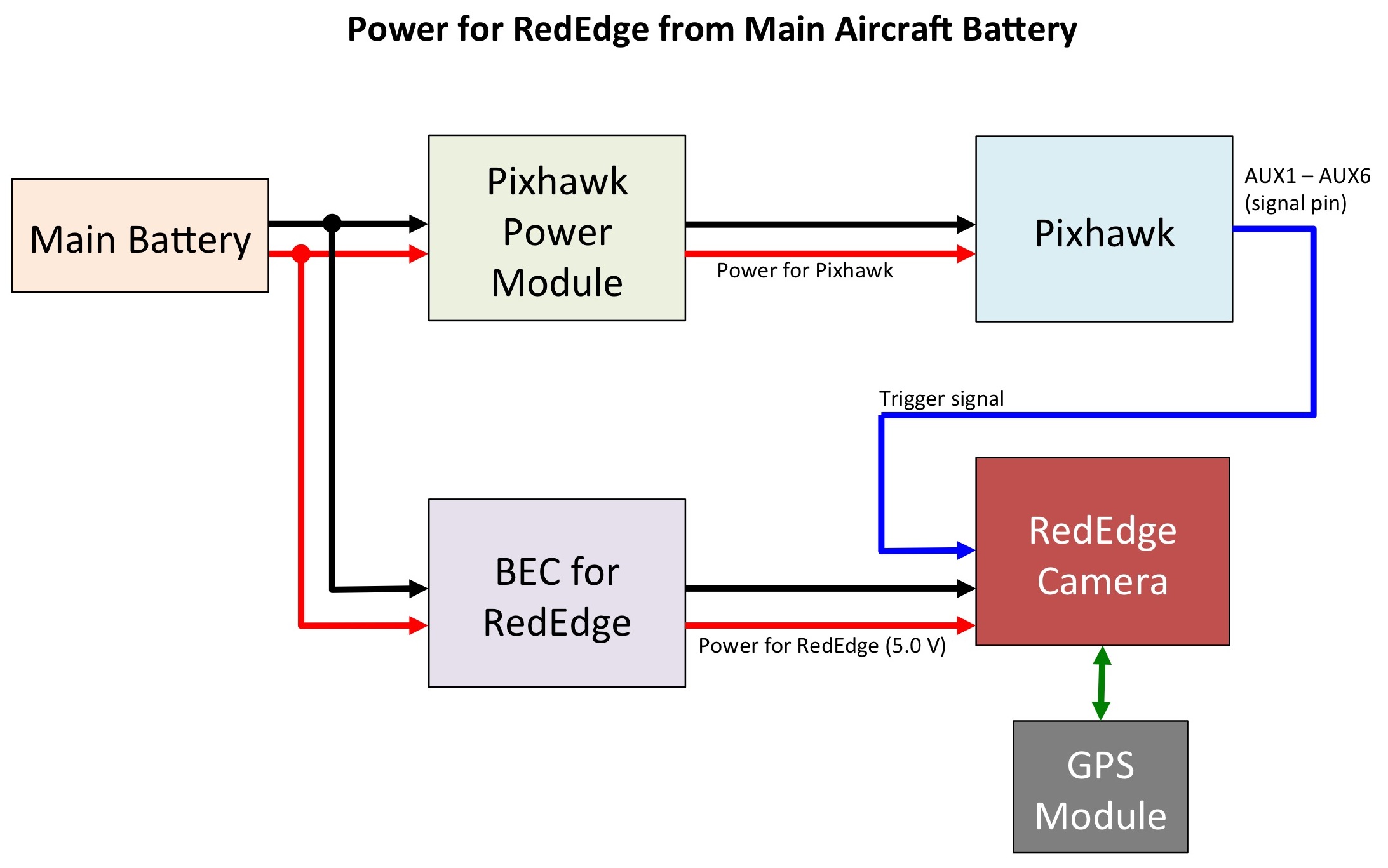
b) If the power source for the RedEdge camera is the same as that used for the Pixhawk, then simply connect the signal pin of the AUX1 - AUX6 outputs of the Pixhawk. The ground is shared in this situation.
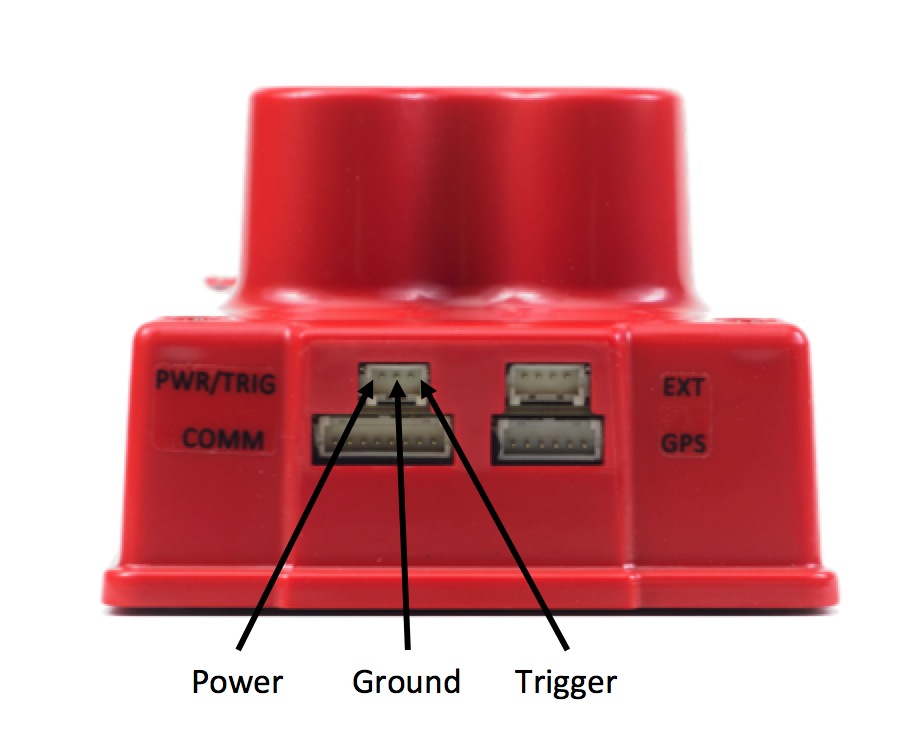
Refer to the RedEdge Integration Guide for connector and proper pinout. Image below shows a quick summary.
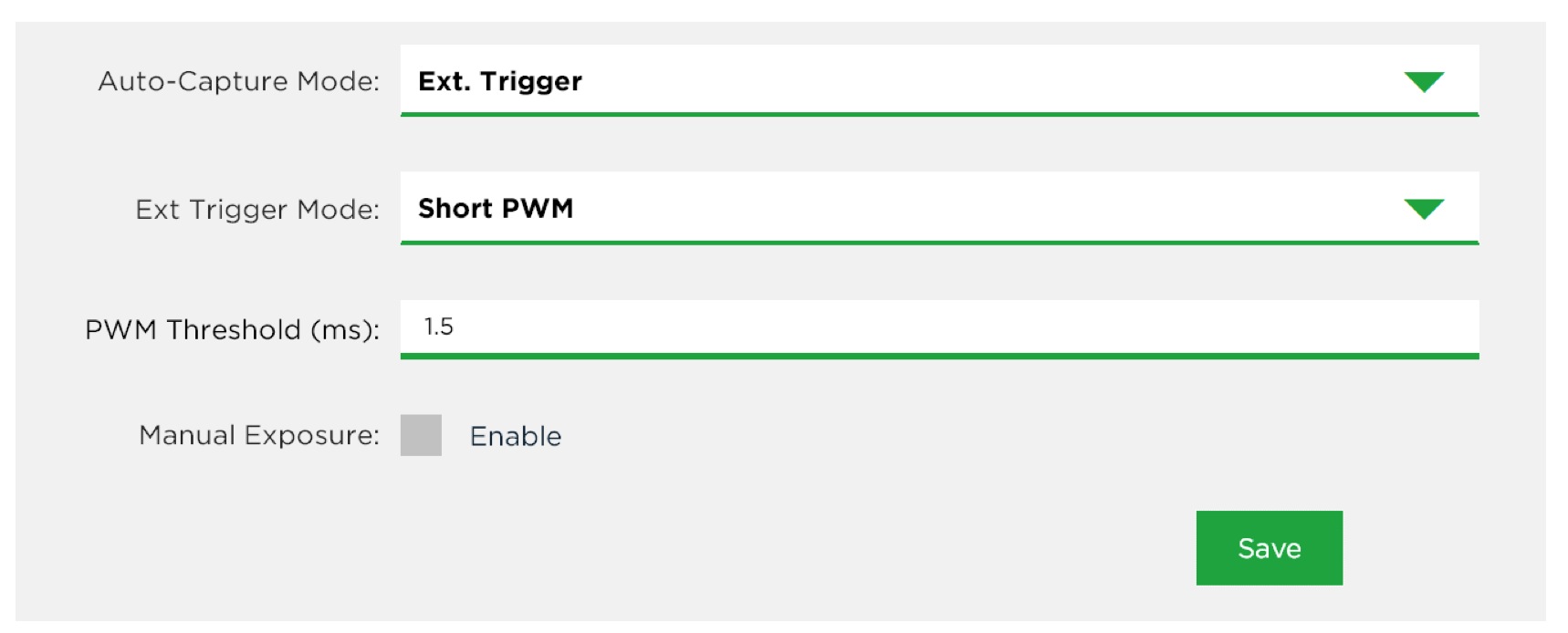
In the RedEdge camera's Settings page, specify External Trigger for Auto-Capture Mode with PWM selected. A typically used threshold is 1.5 ms. Note that the Target Altitude setting is ignored for External Trigger. Refer to the RedEdge User Manual for more details on these settings.
For the Pixhawk, use Mission Planner (or other application that controls the autopilot) to specify which AUX channel is used for camera triggers. Refer to this tutorial in the Ardupilot Wiki.