Note: this guide also applies to the DLS 2.
Video
Documentation
This procedure is for the provided GPS only and is not required for configurations that provide GPS/attitude information via the APIs. If the configuration for your RedEdge and DLS is one that uses the provided GPS module for GPS and magnetometer data, a calibration process for the magnetometer is needed. This process also works with the DLS2.
NOTE: You will need a compass to verify the calibration once completed.
From the Settings page, access the DLS Configuration section.
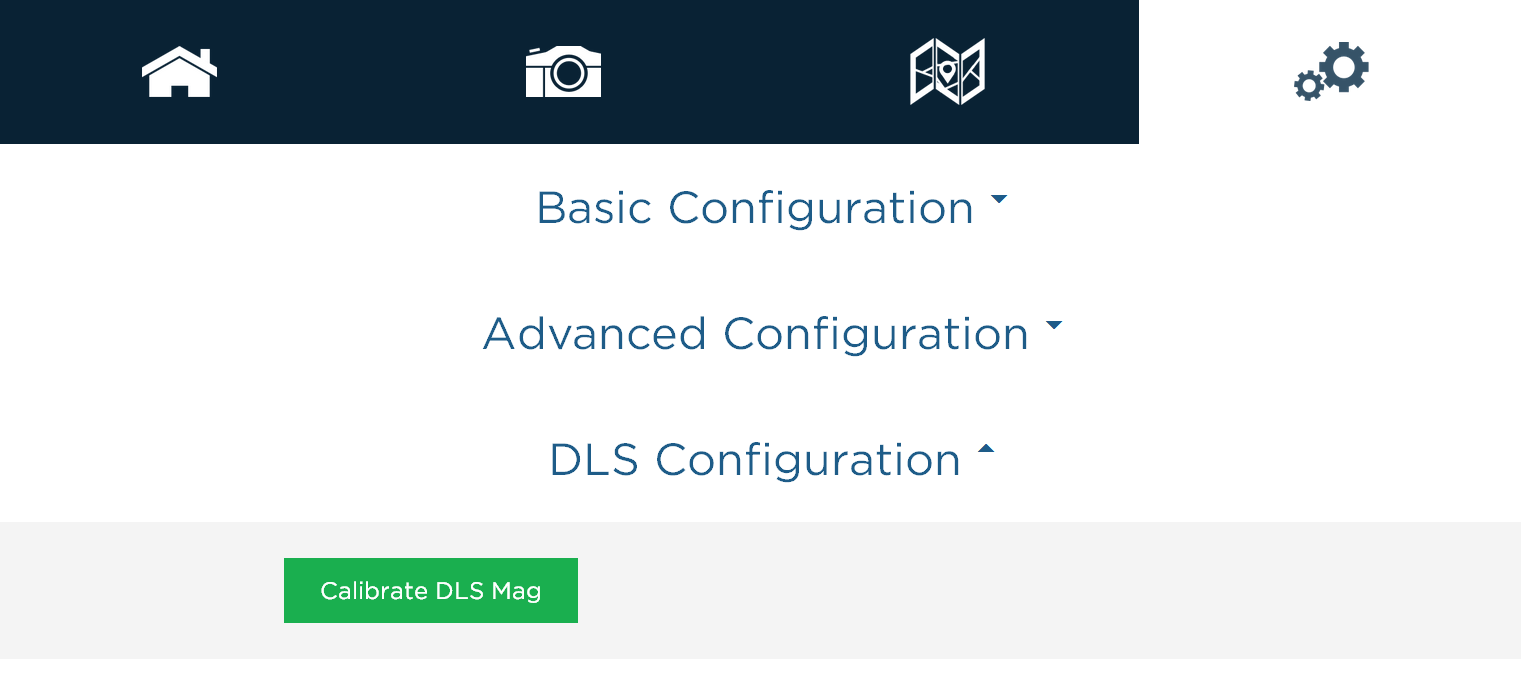
“Calibrate DLS Mag” is a clickable link that will start the calibration process. This calibration process is for the magnetometer sensor that is inside the 3DR GPS module.
First, ensure that the DLS is connected to the GPS module. Additionally, your DLS and GPS module should be rigidly mounted to your aircraft frame.
NOTE Before beginning the calibration routine, position yourself and the drone away from large metal objects such as cars and buildings. Also avoid paved areas, which may have metal rods inside the cement. An open field is preferred to avoid interaction with any sources of magnetic interference or objects that may perturb the Earth’s natural magnetic field.
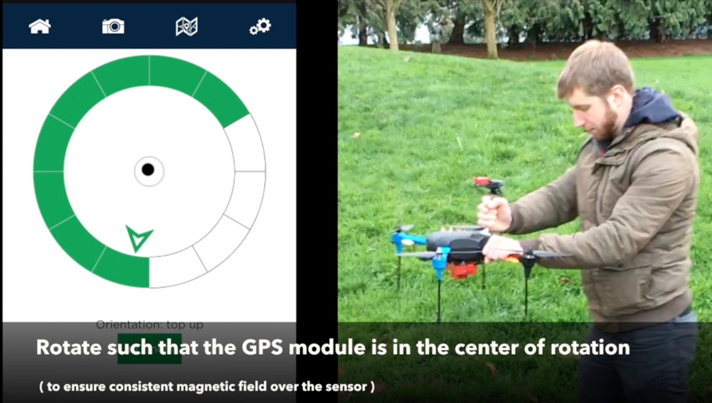
Once the startup sequence has finished, you will be shown a screen with instructions for which orientation your drone should be in for each of the calibration steps.

To calibrate the magnetometer, a 6-axis calibration routine needs to be performed. During the routine, the drone (specifically the GPS module) should remain in a fixed position while being rotated, i.e. the user performing the calibration should be moving around the magnetometer. The on-screen rotation guide will show you when you have successfully completed one orientation and can move on to the next.
|
NOTE |
|
The black dot is a level (like a bubble level), indicating how level the unit is compared to the plane it is on. It does not indicate how far away from the center of rotation the unit is. |
NOTE If you are using a MAVLINK or ethernet connection to supply GPS and attitude information to the RedEdge camera, you do not need to perform the magnetometer calibration described above.
Magnetic Heading Check
Once the calibration routine has been completed, it is important to verify that the magnetometer information displayed in the Heading section of the RedEdge Home Page is accurate.
A handheld compass has been provided with your DLS kit that will allow you to verify this in the field. Access the camera’s Home Page and use the “Heading” field to check the four cardinal directions (North, East, South, West) and ensure a good match between the compass and the reading by the camera. You should see an error of less than +/- 5 degrees. If this error is exceeded, redo the magnetometer calibration.

Additionally, you will want to perform a magnetic interference test to verify that your drone will not affect the heading readings during flight.
Magnetic Interference Check
A test procedure should be conducted any time electrical equipment is added or removed from the drone to ensure the magnetic field profile of the aircraft has not changed.
To test for any magnetic interference from the drone that is affecting the magnetometer, start by placing your drone facing North (you can use the magnetic heading from the Wi-Fi page to align yourself).
WARNING
The next section involves spinning up the motors of your drone.
If you have a fixed wing aircraft this will require holding the plane in place while keeping clear of the propeller.
If using a multi-rotor, set up the aircraft as if it was ready for a normal take off, but you do not need to actually take off; Just have the motors spin up.
You DO NOT need to provide full power to the motor(s).
Throttle up the motor(s) on your drone and ensure that the heading reading has not changed, then throttle back down. Repeat this for each direction (North, East, South, West) to ensure there is no magnetic interference in any of the four cardinal directions.
| WARNING |
| FAILURE TO FOLLOW INSTRUCTIONS TO KEEP CLEAR OF SPINNING BLADES COULD RESULT IN INJURY OR DEATH. |
NOTE Electromagnetic interference during the operation of your drone can cause errors in the magnetic heading readings. This can cause the irradiance data generated by the DLS to be not usable during processing.
This process of calibrating the magnetometer should only be done once.You only need to perform a magnetometer calibration if the drone setup changes. If you've switched drones, switched cameras, or switched DLS units, you should recalibrate. Otherwise it should not be necessary.